U skladu s člankom 3. stavkom 2.
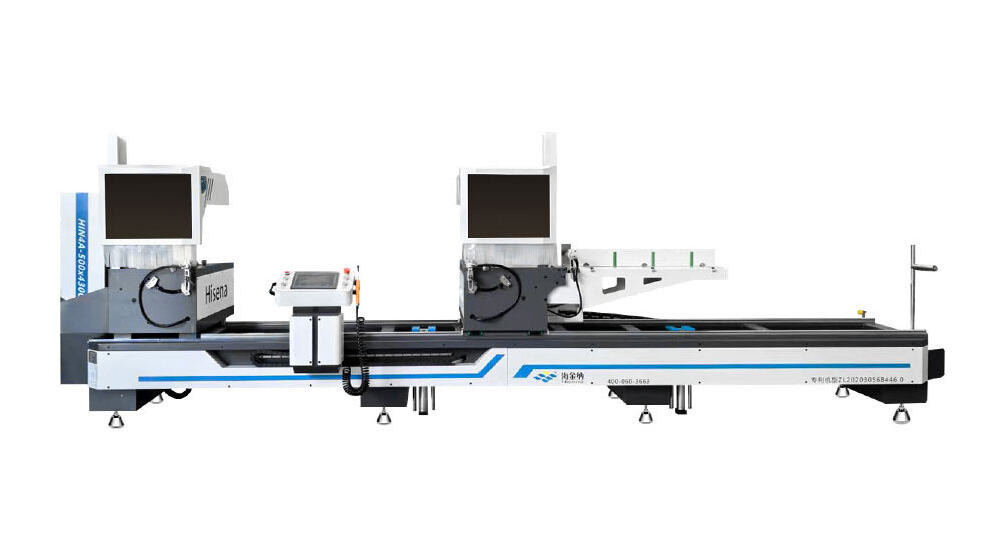
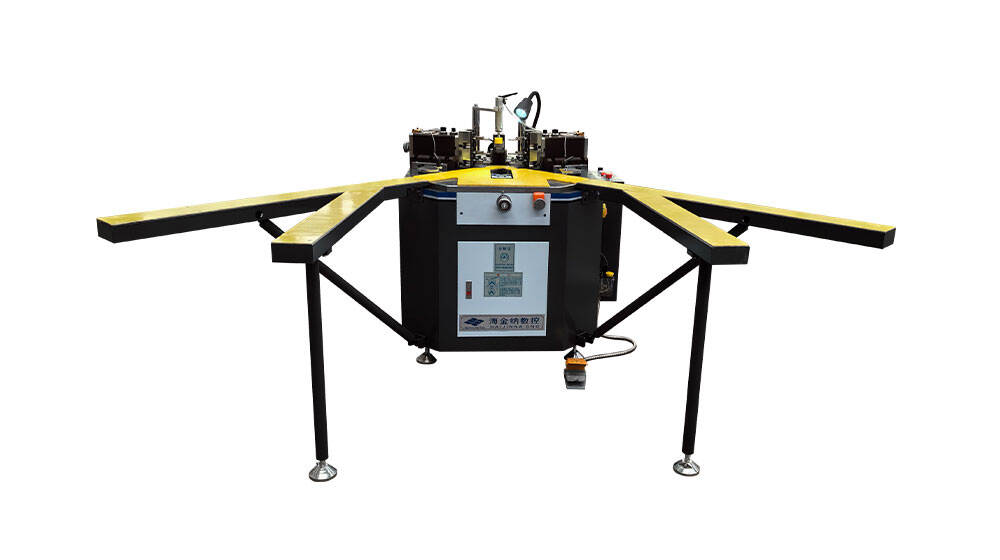
Mehanizam rukovanja materijalom i hranjenja uključen u automatnu stroju za rezanje aluminijuma revolucionarno poboljšava učinkovitost radnog toka uklanjanjem uskih grla povezanih s ručnim pozicioniranjem materijala. Ovaj sveobuhvatan sustav upravlja aluminijumskim profilima od početnog učitavanja do konačnog odricanja, minimizirajući intervenciju operatora i maksimizirajući prolaznost. Automatski sastav za hranjenje koristi precizne valjake i vodnike koji podupiru materijale duž cijele dužine, sprečavajući opuštanje ili okretanje koje bi moglo utjecati na točnost rezanja. Pneumatički ili servo pogon motori za dodavanje materijala na programiranim brzinama, savršeno sinhronizirani s ciklusima rezanja kako bi se održao neprekidan rad. Sistem može prilagoditi različite oblike i veličine profila kroz podešavajuće konfiguracije podržavača, rukovanje okruglim cijevima, kvadratnim presjekama, kutovima i složenim ekstrudiranjima bez potrebe za opsežnim postupcima promjene. Inteligentni senzori otkrivaju ubacivanje materijala i automatski pokreću niz hranjenja, povlačeći profile u zonu rezanja optimalnom brzinom za naknadne radove. U skladu s člankom 3. stavkom 2. točkom (a) ovog članka, za proizvodnju proizvoda s različitim dužinama, za proizvodnju proizvoda s različitim dužinama, za proizvodnju proizvoda s različitim dužinama, za proizvodnju proizvoda s različitim dužinama, za proizvodnju proizvoda s različitim dužinama, za proizvodnju proizvoda s različ Mehanizam za hranjenje uključuje sustave za zaustavljanje materijala koji točno pozicioniraju profile za rezanje, koristeći podešavne zaustavljanja koja se mogu programirati za više dužina u jednom proizvodnom trku. Ova mogućnost omogućuje učinkovitu obradu popisa rezova bez intervencije operatora između komada, što dramatično smanjuje vrijeme ciklusa za složene narudžbe. Funkcije povratnog unosa omogućuju stroju da nakon svakog rezanja ponovno pozicionira preostali materijal, pripremajući se automatski za sljedeću operaciju bez ručnog rukovanja. U skladu s člankom 3. stavkom 1. točkom (a) Uredbe (EZ) br. 765/2008 Komisija je odlučila o uvođenju mjera za utvrđivanje mjera za utvrđivanje mjera za utvrđivanje mjera za utvrđivanje mjera za utvrđivanje mjera za utvrđivanje mjera za utvrđivanje mjera za utvrđ Sistem rukovanja materijalima uključuje transportne nosioce za pražnjenje ili spremnike za prikupljanje koji organiziraju gotove dijelove, održavaju ih odvojene i sprečavaju oštećenje od gomilanja ili kontakta. U nekim konfiguracijama uključeni su automatizirani mehanizmi sortiranja koji usmjeravaju različite dužine na određena područja za prikupljanje, pojednostavljujući poslove rukovanja i pakiranja nizvodno. U skladu s člankom 3. stavkom 2. točkom (a) ovog članka, za potrebe sustava za upravljanje materijalima, za potrebe sustava za upravljanje materijalima, za potrebe sustava za upravljanje materijalima, za potrebe sustava za upravljanje materijalima, za potrebe sustava za upravljanje materijalima, za potrebe sustava za upravljanje materijalima, za potrebe sustava za upravljanje materijali Cijeli sustav za hranjenje radi s izvanrednom energetskom učinkovitostom, koristeći pokret samo kada je potrebno i uključuju regenerativne kočne sustave koji vraćaju energiju tijekom faza usporavanja. Ovaj pažljiv inženjering smanjuje operativne troškove uz podršku ciljevima održivosti okoliša. U skladu s člankom 3. stavkom 1. točkom (a) Uredbe (EZ) br. 765/2008 i člankom 3. stavkom (b) Uredbe (EZ) br. 765/2008 i člankom 3. stavkom (b) Uredbe (EZ) br. 765/2008 i člankom 3. stavkom (b) Uredbe (EZ) br. 765/2008 i
 ×
×